همانطور که می دانید، ماشین های AC را می توان بیشتر به عنوان ماشین های القایی و ماشین های سنکرون طبقه بندی کرد. و از این رو، ژنراتورهای AC به عنوان ژنراتورهای سنکرون که معمولاً به عنوان آلترناتور و ژنراتور القایی شناخته می شوند یا به آنها ژنراتور ناهمزمان می گویند.
در این مقاله، هر یک از این ژنراتورها را به طور جداگانه مورد بحث قرار می دهیم و مشخصات آنها را با هم مقایسه می کنیم تا تفاوت آنها مشخص شود. بنابراین طبق معمول و اولاً باید تعریفی از هر یک از این ژنراتورها داشته باشیم. پس از اینکه مشخص کردیم آنها چه هستند، باید به بخش بعدی برویم تا نحوه عملکرد آنها را نشان دهیم. در دو بخش آخر، تفاوتها را در نظر میگیریم و تفاوتهای اقتصادی آنها را توضیح میدهیم.
ژنراتور سنکرون چیست؟
ژنراتور سنکرون یک دینام با سرعت روتور برابر با میدان مغناطیسی دوار استاتور است. با توجه به ساختار، می توان آن را به دو نوع تقسیم کرد: یک آرمیچر دوار و یک میدان مغناطیسی دوار. ژنراتورهای سنکرون یکی از رایج ترین دینام ها هستند. در صنعت برق مدرن، به طور گسترده ای در نیروگاه های آبی، انرژی حرارتی، انرژی هسته ای و تولید برق دیزل استفاده می شود.

ژنراتور آسنکرون چیست؟
ژنراتور القایژنراتور القایی یک دینام است که از یک میدان مغناطیسی دوار شکاف هوا بین استاتور و روتور برای تعامل با جریان القایی در سیم پیچ روتور استفاده می کند. آنها معمولاً به عنوان ژنراتورهای ناهمزمان شناخته می شوند. سرعت کمی بالاتر از سرعت سنکرون است. توان خروجی با نرخ لغزش افزایش یا کاهش می یابد. می تواند توسط شبکه برق تحریک شود یا با یک خازن قدرت خود تحریک شود.ی چیست؟
یک ژنراتور آسنکرون چگونه کار می کند؟
در قسمت قبل دو تعریف ساده از اینکه ژنراتور القایی و سنکرون چیست به شما ارائه کردیم. در ادامه نحوه عملکرد متفاوت این دو ژنراتور را به شما نشان خواهیم داد.
یک ژنراتور القایی زمانی برق تولید می کند که روتور آن سریعتر از سرعت سنکرون بچرخد. برای یک موتور چهار قطبی معمولی که در آن دو جفت قطب روی یک استاتور وجود دارد که روی یک شبکه الکتریکی 60 هرتز کار می کنند، سرعت سنکرون 1800 چرخش در دقیقه است. همان موتور چهار قطبی که بر روی شبکه 50 هرتز کار می کند دارای سرعت سنکرون 1500 چرخش در دقیقه خواهد بود. موتور معمولاً کمی کندتر از سرعت سنکرون می چرخد. همانطور که می دانید تفاوت بین سرعت سنکرون و عملکرد لغزش نامیده می شود و معمولاً به صورت درصدی از سرعت سنکرون بیان می شود. به عنوان مثال، موتوری که با 1450 چرخش در دقیقه کار می کند و سرعت سنکرون آن 1500 RPM است، با لغزش +3.3٪ کار می کند.
در عملکرد معمولی موتور، چرخش شار استاتور سریعتر از چرخش روتور است. این باعث می شود که شار استاتور جریان های روتور را القا کند، که یک شار روتور با قطبیت مغناطیسی مخالف استاتور ایجاد می کند. به این ترتیب، روتور در امتداد پشت شار استاتور کشیده میشود و جریانهای روتور در فرکانس لغزش القا میشوند.
در عملکرد ژنراتور، یک محرک اصلی مانند توربین یا هر نوع موتوری، روتور را بالاتر از سرعت سنکرون (لغزش منفی) به حرکت در می آورد. شار استاتور همچنان جریانهایی را در روتور القا میکند، اما از آنجایی که شار روتور مخالف اکنون سیمپیچهای استاتور را قطع میکند، یک جریان فعال در سیمپیچهای استاتور تولید میشود و موتور اکنون به عنوان یک ژنراتور عمل میکند و برق را به شبکه الکتریکی باز میفرستد.
یک ژنراتور سنکرون چگونه کار می کند؟
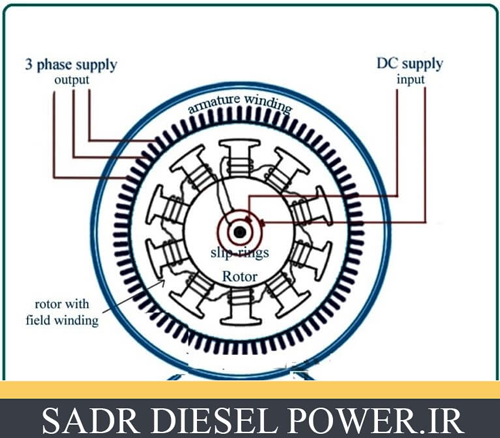
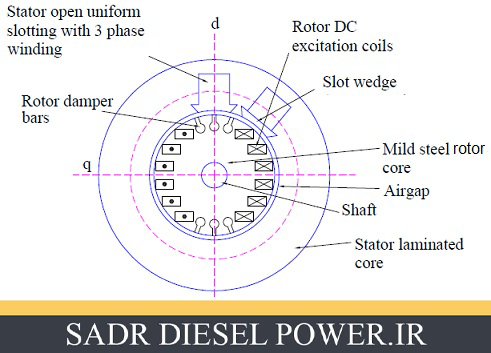
اصل کار ژنراتور سنکرون مانند ژنراتور DC است. از قانون القای الکترومغناطیسی فارادی استفاده می کند. این قانون بیان میکند که وقتی جریان در یک میدان مغناطیسی در داخل هادی القا میشود، حرکت نسبی بین رسانا و همچنین میدان مغناطیسی وجود خواهد داشت. در یک ژنراتور سنکرون، میدان مغناطیسی بی حرکت است و هادی ها می چرخند. با این حال، در ساخت عملی، هادی های آرمیچر بی حرکت هستند و آهنرباهای میدان بین آنها می چرخند.
روتور در ژنراتور سنکرون را می توان به صورت مکانیکی به سمت محور ثابت کرد تا با سرعت سنکرون تحت مقداری نیروی مکانیکی بچرخد که پیامدهای آن برش شار مغناطیسی در هادی های آرمیچر ثابت استاتور است. با توجه به این نتیجه برش شار مستقیم، یک emf القایی و جریان جریان در هادی های آرمیچر وجود دارد. برای هر سیم پیچ، یک جریان در نیم سیکل اول پس از آن در نیم سیکل دوم با تاخیر زمانی مشخص 120 درجه وجود خواهد داشت.
سه تفاوت اصلی بین ژنراتور القایی در مقابل ژنراتور سنکرون
اکنون که میدانید ژنراتورهای القایی و سنکرون چگونه کار میکنند، اجازه دهید در مورد تفاوتهای بین دو نوع ژنراتور کمی دقیقتر صحبت کنیم. در ادامه با سه مورد از مهم ترین تفاوت های این دو ژنراتور بیشتر آشنا خواهید شد.
1. در ژنراتور سنکرون، شکل موج ولتاژ تولیدی هماهنگ شده و مستقیماً با سرعت روتور مطابقت دارد. فرکانس خروجی را می توان به صورت f = N * P / 120 هرتز ارائه کرد. که در آن N سرعت روتور بر حسب دور در دقیقه و P تعداد قطب ها است.
در مورد ژنراتورهای القایی، فرکانس ولتاژ خروجی توسط سیستم قدرتی که ژنراتور القایی به آن متصل است تنظیم می شود. اگر ژنراتور القایی یک بار مستقل را تامین کند، فرکانس خروجی کمی کمتر خواهد بود (2 یا 3٪) که از فرمول f = N * P / 120 محاسبه می شود.
2. سیستم تحریک مستقیم DC جداگانه در یک دینام یا ژنراتور سنکرون مورد نیاز است در حالی که یک ژنراتور القایی توان راکتیو را از سیستم قدرت برای تحریک میدان می گیرد. اگر منظور از ژنراتور القایی برای تامین بار مستقل باشد، باید یک بانک خازن برای تامین توان راکتیو متصل شود.
3. ساخت ژنراتور القایی پیچیدگی کمتری دارد زیرا نیازی به برس و آرایش حلقه لغزنده ندارد. برس ها در ژنراتور سنکرون برای تامین ولتاژ DC به روتور برای تحریک مورد نیاز هستند.
مقایسه اقتصادی بین ژنراتور القایی در مقابل ژنراتور سنکرون
در اینجا به آخرین قسمت این مقاله می رسیم. جایی که به بررسی تفاوت های دو مولد از نظر بازده اقتصادی می پردازیم.
- نیروگاه مجهز به ژنراتورهای ناهمزمان به دلیل نبود سیستم تحریک DC و دستگاه های سنکرون هزینه سرمایه گذاری پایینی دارد. علاوه بر این، از آنجایی که حلقه کلکتور، برس و سیم پیچ تحریک روتور وجود ندارد، هزینه های نگهداری و بهره برداری کم است.
- روتور ژنراتور ناهمزمان یک سیم پیچ روتور شبیه به قطب مخفی و ژنراتور غیر سنکرون است. بنابراین راندمان کلی بالاتر از ژنراتور سنکرون با همان ظرفیت و سرعت یکسان است. تحت یک منبع آب، ژنراتور ناهمزمان می تواند قدرت بیشتری تولید کند.
- مزایای اقتصادی فوق الذکر ژنراتورهای ناهمزمان تا حدی با تحریک لازم یا ظرفیت سنکرون اضافی یا خازن های اضافی ژنراتور ناهمزمان جبران می شود.
- مقدار تحریک مورد نیاز برای ژنراتور ناهمزمان با سرعت نامی موتور نسبت معکوس دارد. هر چه سرعت بیشتر باشد، تحریک مقدار هدف کمتر است.
- مساحت نیروگاه ژنراتور ناهمزمان کوچکتر از نیروگاه ژنراتور سنکرون است.
جدول مقایسه ارائه شده در زیر تمام تفاوت های کلیدی بین موتور سنکرون و موتور ناهمزمان را نشان می دهد.
| کلید | موتور سنکرون | موتور آسنکرون |
| تعریف | موتور سنکرون یک ماشین AC است که سرعت روتور آن با میدان مغناطیسی چرخشی سیم پیچ استاتور هماهنگ است. | موتور آسنکرون یک ماشین AC است که سرعت روتور آن با میدان مغناطیسی چرخشی سیم پیچ استاتور هماهنگ نیست. |
| سرعت روتور | سرعت روتور موتور سنکرون با سرعت دورانی میدان مغناطیسی استاتور برابر است. | سرعت روتور موتور سنکرون کمتر از سرعت دورانی میدان مغناطیسی استاتور است. |
| اصل کار | موتور سنکرون بر اساس اصل قفل شدن میدان های مغناطیسی روتور و استاتور کار می کند. | موتور ناهمزمان بر روی مکانیسم القای الکترومغناطیسی موجود بین میدان های مغناطیسی استاتور و روتور کار می کند. |
| بازنمایی نمادین | مقاومت با حرف R نشان داده می شود. | امپدانس با حرف Z نشان داده می شود. |
| فرمول سرعت روتور | سرعت روتور موتور سنکرون برابر با سرعت سنکرون است. بنابراین، با Ns=120f/P داده میشود که در آن NS سرعت سنکرون، f فرکانس عرضه و P تعداد قطبهای استاتور است. | سرعت روتور برای یک موتور ناهمزمان با N R = N S (1-s) داده می شود که در آن s لغزش است، N S سرعت سنکرون و N R سرعت روتور است. |
| عوامل موثر بر سرعت موتور | تعداد قطب های استاتور و توان AC ورودی عرضه شده عوامل تعیین کننده سرعت موتور سنکرون هستند. | لغزش موتور، بار مکانیکی و مقاومت مدار روتور عوامل تعیین کننده سرعت موتور ناهمزمان هستند. |
| واحد اندازه گیری | واحد SI اندازه گیری سرعت سنکرون رادیان بر ثانیه (Rad/s) یا دور در دقیقه (rpm) است. | واحد اندازه گیری سرعت ناهمزمان SI نیز رادیان بر ثانیه (Rad/s) یا دور در دقیقه (rpm) است. |
| لغزش موتور | لغزش موتور سنکرون صفر است، یعنی سرعت چرخش هر دو روتور و استاتور برابر است. | لغزش موتور آسنکرون بین 0 و 1 است. لغزش موتور آسنکرون هرگز صفر نیست. |
| وابستگی بار به سرعت | تغییر بار مکانیکی بر سرعت موتور سنکرون تأثیر نمی گذارد. | تغییر در بار مکانیکی منجر به تغییرات در سرعت موتور ناهمزمان می شود. |
| منبع تغذیه روتور | برای تولید میدان مغناطیسی روتور، برق DC به روتور عرضه می شود. | روتورهای ناهمزمان به هیچ شکلی از تحریک نیاز ندارند و می توانند به تنهایی شروع به چرخش کنند. |
| کنترل سرعت موتور | برای کنترل سرعت موتور سنکرون از درایو فرکانس متغیر (VFD) برای تغییر فرکانس استفاده می شود. | برای کنترل سرعت موتور ناهمزمان، از درایو فرکانس متغیر (VFD) و مقاومت روتور متغیر (VRR) برای تغییر فرکانس استفاده می شود. |
| مخارج سرمایه ای | هزینه مدیریت موتورهای سنکرون بیشتر است. | هزینه مدیریت موتورهای آسنکرون نسبتاً کمتر است. |
| کارایی | راندمان عملکرد یک موتور سنکرون نسبتاً بالاتر است. | راندمان عملکرد موتورهای آسنکرون نسبتاً کمتر است. |
| مقدار سرعت موتور | سرعت متوسط موتور 300 دور در دقیقه است. | سرعت متوسط موتور کمی بالاتر از 600 RPM است. |
| ضریب قدرت | ضریب قدرت یک موتور سنکرون یا یکپارچگی، پیشرو یا عقب ماندگی است. | ضریب قدرت موتور ناهمزمان همیشه عقب است. |
| برنامه های کاربردی | موتور سنکرون کاربرد خود را در تصحیح ضریب توان و عملکرد بارهای مکانیکی می یابد. | موتور ناهمزمان فقط برای کار با بارهای مکانیکی استفاده می شود. |
نتیجه
در نتیجه، موتورهای سنکرون و ناهمزمان در کاربردهای صنعتی برای هدایت بارهای مکانیکی سنگین حیاتی هستند. از این مقاله مشاهده می شود که اگرچه موتورهای سنکرون از نظر عملکرد نسبتاً کارآمدتر هستند، اما هزینه نگهداری و نصب بالایی دارند.
مهم ترین تفاوت بین آنها این است که موتورهای سنکرون دارای میدان مغناطیسی روتور و استاتور خود هستند که با سرعت یکسانی می چرخند، در حالی که موتورهای ناهمزمان دارای سرعت های متفاوتی هستند که معمولاً به عنوان لغزش شناخته می شود. علاوه بر این، سهولت کار موتورهای آسنکرون در مقایسه با موتورهای سنکرون، مزیت اضافی عملکرد موتورهای آسنکرون است.